Angesichts des rasanten technischen Fortschritts entwickeln sich zunehmend neue Fachbegriffe – auch in der Welt der Robotik. Um Sie mit den modernsten Termini zu dieser Thematik vertraut zu machen, erklären wir hier 10 Begriffe rund um die Robotik.
Mit dem Begriff Humanoider Roboter wird ein Roboter beschrieben, dessen Konstruktion dem Menschen ähnelt. Im Vergleich zu einem Androiden zielt die Entwicklung hier nicht auf die konkrete Imitation des Menschen ab. Jedoch sind die Positionen der Gelenke sowie Bewegungsabläufe vom menschlichen Bewegungsapparat inspiriert. Darüber hinaus werden Sinneswahrnehmungen wie Hören, Sehen und Fühlen bei Humanoiden Robotern durch Sensorik realisiert.
Insbesondere für die Übernahme von Serviceaufgaben im privaten, nicht-industriellen Raum ist der Einsatz Humanoider Roboter sinnvoll.
Roboter, die für die direkte Interaktion beziehungsweise Kollaboration mit Menschen konzipiert wurden: Cobots – Kollaborative Roboter. Ziel ist es, dass Cobots den Menschen nicht ersetzen, sondern vielmehr mit ihm effizient zusammenarbeiten. Somit lassen sich die Vorteile des Menschen wie Flexibilität und Kreativität mit den Vorzügen des Roboters wie Präzision und Ausdauer kombinieren. Einen großen Nutzen der kollaborativen Robotik stellt die einfache Bedien- und Programmierbarkeit dar, die auch ohne Programmierkenntnisse möglich ist.
Dank ihrer Flexibilität lassen sich Cobots in zahlreiche Prozesse der Produktionskette integrieren und können verschiedenste Aufgaben wie das Schweißen, die Montage oder das Verpacken übernehmen.
Maschinelles Lernen umfasst einen Teilbereich der künstlichen Intelligenz, der IT-Systeme in die Lage versetzt, automatisch und unprogrammiert aus Erfahrungen zu lernen und sich zu verbessern. Automatisiertes Wissen kann generiert, Algorithmen trainiert, Zusammenhänge erschlossen und unbekannte Muster erkannt werden. Anschließend sind identifizierte Muster und Zusammenhänge auf einen neuen, unbekannten Datensatz anwendbar. Somit lassen sich Vorhersagen treffen und Prozesse optimieren.
Für die Umsetzung von maschinellem Lernen ist das Trainieren des Algorithmus durch einen Menschen notwendig. Beim sogenannten Modelltraining werden Trainings- sowie Beispieldaten bereitgestellt, aus denen der Algorithmus Muster und Zusammenhänge erkennen und daraus lernen kann.
Die Smart Factory, übersetzt „intelligente Fabrik“, ist aus der Industrie 4.0 nicht mehr wegzudenken. Es handelt sich um eine sich selbst organisierende Produktionsumgebung, in der der Mensch eine kontrollierende und überwachende Funktion einnimmt, aber an immer weniger Stellen direkt am Produktionsprozess beteiligt ist. Sie basiert auf intelligenten Produktionsanlagen, die miteinander kommunizieren, über Sensoren gesammelte Informationen auswerten und Fertigungsprozesse nahezu selbstständig koordinieren.
Technologien wie Industrieroboter, fahrerlose Transportsysteme, moderne Lager- und Fördertechnik und Drohnen bilden dabei die Säulen für die Umsetzung der Zukunftsfabrik.
 Die Smart Factory steht im Zentrum der sogenannten Industrie 4.0.
Die Smart Factory steht im Zentrum der sogenannten Industrie 4.0.
Beim Bin Picking oder „Griff in die Kiste“ entnimmt ein Roboter mithilfe einer 3D-Kamera aus einem Behälter mit ungeordneten Einzelteilen bestimmte Bauteile und führt diese in korrekter Ausrichtung der weiteren Bearbeitung zu. Herausforderung dabei ist die Verarbeitung von Objekten verschiedener Formen, die in Kisten völlig chaotisch angeordnet sind.
Aus einer smarten Fertigung ist die automatische Objekterkennung und -positionierung als Mittel zur Steigerung von Effizienz und Produktivität nicht mehr wegzudenken.
In der Robotik bezeichnet Time of Flight das Lichtlaufzeitverfahren mobiler Roboter, das die autonome Bewegung ermöglicht. Hierbei messen 3D-Kameras Raumtiefen und Distanzen, indem die Szene zuerst mittels eines Lichtpulses ausgeleuchtet wird. Anschließend misst die Kamera für jeden Bildpunkt die Zeit des Weges, die das Licht bis zum Objekt und wieder zurück benötigt.
Time-of-Flight-Kameras eignen sich besonders für Anwendungen, in denen ein großer Arbeitsabstand gepaart mit hoher Geschwindigkeit und geringer Komplexität gefragt ist. Speziell für Volumenmessungen in der Logistik, für Palettierungs- und Depalettierungsaufgaben sowie für autonom fahrende Fahrzeuge im Logistik- und Produktionsumfeld ist diese Kameratechnologie geeignet.
Plug and Play bezeichnet eine Technologie, die es ermöglicht, Geräte an einen Computer anzuschließen und direkt zu nutzen. Eine manuelle Konfiguration oder das Installieren eines Treibers ist dabei nicht notwendig.
Anwendung findet das Prinzip im neuen Smart-System IHD von Harmonic Drive®. Das IHD-System umfasst ein spielfreies Getriebe, einen hochentwickelten Servo-Motor, ein duales Motorfeedbacksystem zur Positionsmessung und einen leistungsfähigen Motion Controller in einer fertigen Antriebslösung. Unterstützt wird die einfache Integration in Ihre Applikation nicht nur durch die zentrale Hohlwelle des Antriebs, die für das Durchführen unterschiedlichster Medien prädestiniert ist, sondern auch durch unsere eigens entwickelte, anwenderfreundliche Software-Lösung zur einfachen Inbetriebnahme.
Dank thermischer Optimierung seines Designs erfüllt der IHD alle Voraussetzungen für Hochleistungsanwendungen im Bereich stationärer und mobiler Antriebstechnik. Überdies verfügt das IHD-System über einen Applikationsprozessor für zukünftige smarte Anwendungen wie Condition Monitoring und kann als separate Plattform für kundenspezifische Applikationsprogrammierungen genutzt werden.
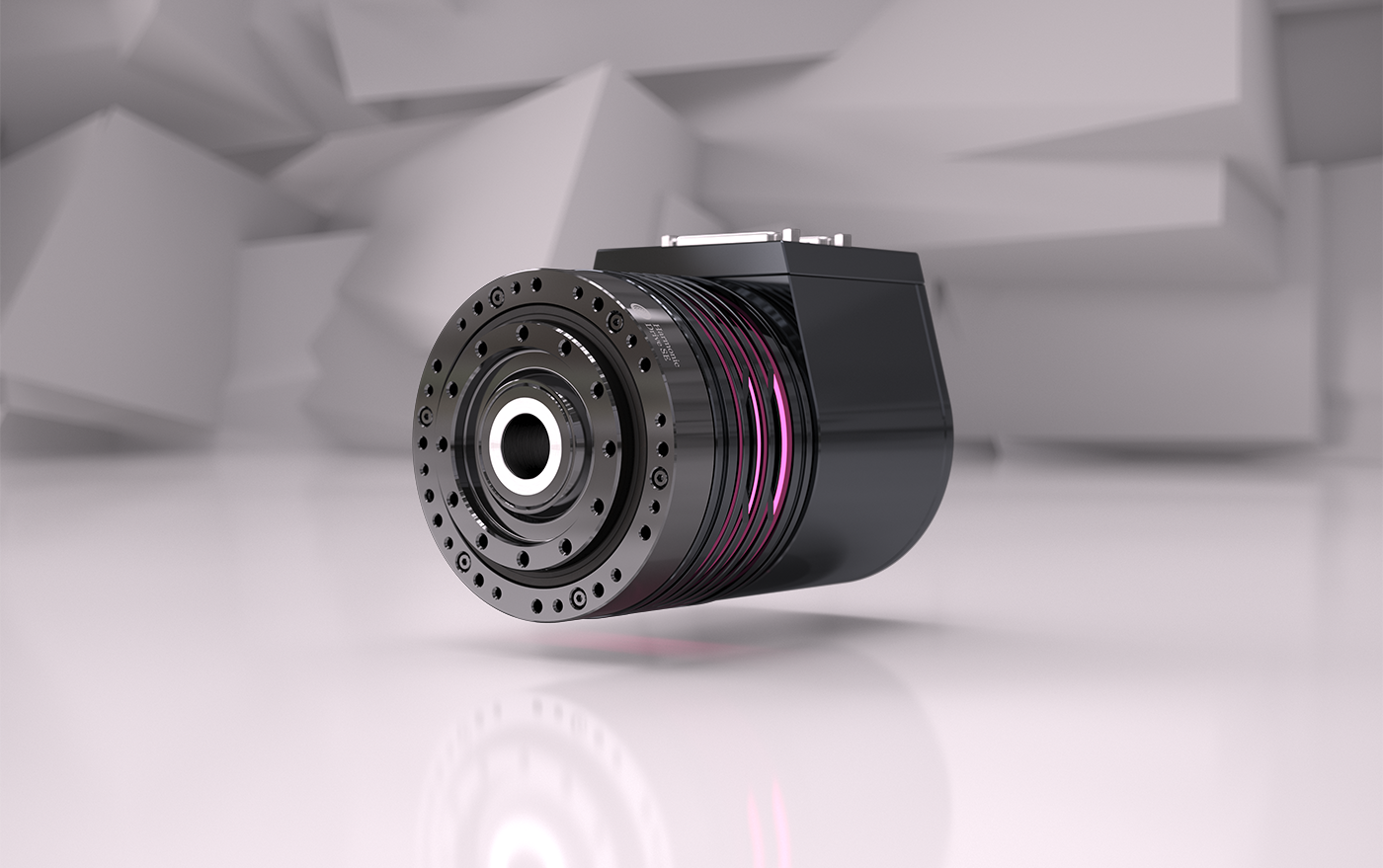 Steif wie ein Direktantrieb, kompakt wie ein Getriebemotor: Das Smart-System IHD.
Steif wie ein Direktantrieb, kompakt wie ein Getriebemotor: Das Smart-System IHD.
Mithilfe des Kraft-Moment-Sensors erhält der Roboter beim Greifen von Bauelementen sein Fingerspitzengefühl. Bildverarbeitende Sensoren helfen, Größe sowie Gewicht der Werkstücke zu registrieren. Automatisch werden die benötigte Druckkraft und die Drehmomente durch den Sensor geregelt und als elektrisches Signal an die Steuerung des Roboters weitergeleitet.
Diese Art der Kraftregelung ermöglicht die Annäherung an die Empfindlichkeit und Geschicklichkeit der menschlichen Hand und die robotisierte Lösung von sensiblen Aufgaben. Insbesondere im Kontext der Digitalisierung und Miniaturisierung wird ein immer höheres Maß an Feinfühligkeit vorausgesetzt.
Der Effektor bezeichnet das Bearbeitungswerkzeug am Ende des Roboterarmes, das vom Roboter zum Werkstück geführt wird. Als Ende der kinematischen Kette ist diese Art Greifer der Teil des Roboters, der die Zielaufgabe ausführt. Endeffektoren dienen somit zur Interaktion des Roboters: zum Greifen, Bearbeiten oder Drehen eines Werkstücks.
Verschiedene Greifersysteme unterscheiden sich in ihrer Methodik: Mechanische Effektoren ähneln meist einer Greifzange und greifen unmittelbar zu. Vakuumsauger oder Saugnäpfe, die das Werkstück für den Transport oder die Bearbeitung ansaugen, werden pneumatische Greifer genannt. Bei magnetischen Effektoren hingegen wird das Werkstück magnetisch angezogen.
Der Manipulator führt die Bewegung der Effektoren im Raum durch. Dieser Roboterarm besteht aus mehreren starren Gliedern, die durch eine bestimmte Gelenktechnik miteinander verbunden sind. Durch gesteuerte Antriebe werden die Gelenke wiederum in ihrer Position verändert. Ein Ende dieser Gliederkette ist die Basis, während das andere Ende frei beweglich und mit einem Werkzeug oder Greifer bestückt ist.
Mit translatorischen und rotatorischen Bewegungen können moderne Industrieroboter nahezu jede Position erreichen, wodurch das Arbeiten an schwierig zu erreichenden Stellen wesentlich leichter wird.