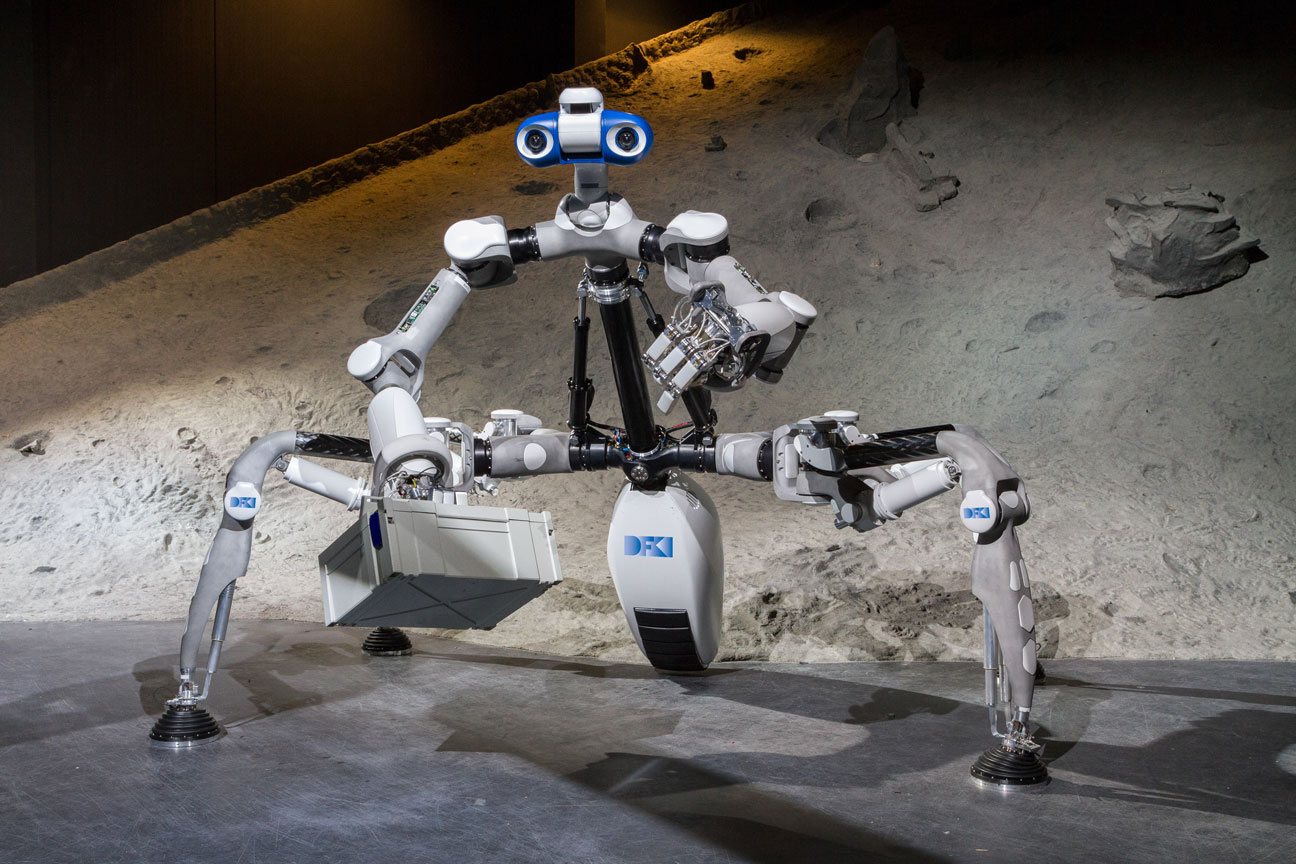
Das Robotics Innovation Center am Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) hat in Zusammenarbeit mit der Universität Bremen den hochmobilen, mehrbeinigen Roboter MANTIS für den Einsatz auf der Erde und im Weltraum entwickelt.
Roboter werden zunehmend mit komplexeren Aufgaben betreut, was zeitgleich die Anforderungen an die intelligenten Systeme erhöht. Der Roboter MANTIS wurde für die Erkundung unwegsamen Geländes im Rahmen des Vorhabens LIMES konzipiert. Dessen Ziel ist die Generierung und Optimierung diverser Bewegungsmuster in unterschiedlichen Situationen. Nach dem Vorbild einer Gottesanbeterin designt, ist der Roboter durch seine sechs Extremitäten sehr beweglich und äußerst flexibel. Er überwindet unwegsames Gelände problemlos und erreicht so auch schwer zugängliches Terrain. Auf der Erde kann der Roboter beispielsweise bei Katastropheneinsätzen unterstützen, im Weltraum kann er Bodenproben entnehmen oder Infrastruktur aufbauen.
MANTIS ist in der Lage, zwei unterschiedliche Grundhaltungen einzunehmen und so verschiedene Aufgaben zu lösen: eine Lokomotionshaltung, bei der alle Extremitäten zur reinen Fortbewegung genutzt werden, und eine Manipulationshaltung, bei der die vorderen Extremitäten als Greifwerkzeuge genutzt werden können, um beispielsweise die Anordnung von Objekten zu verändern. Eine große Anzahl unterschiedlicher Sensoren dient der Umgebungswahrnehmung und ermöglicht beispielsweise die Wahrnehmung der Untergrundbeschaffenheit. Zu diesem Zweck ist der Roboter unter anderem mit Drucksensoren in den Fußsohlen und Sensoren in den Greifflächen ausgestattet.
MANTIS ist als autonomes System konzipiert. Autonome Systeme sollen in der Lage sein, sich schnell auf unvorhergesehene Situationen einzustellen und in diesen agieren zu können. Eine dynamische Rekonfiguration ihrer Verhaltensmodelle ist hierzu unerlässlich. Das virtuelle System des Roboters ist im Stande, anhand diverser Kriterien – wie beispielsweise dem Energieverbrauch oder der Geschwindigkeit – unterschiedliche Laufverhalten zu generieren und zu optimieren. Sofern diese Verhalten stabil und in guter Qualität funktionieren, können sie in einer Verhaltensbibliothek abgelegt und nach Bedarf vom Roboter selektiert und aktiviert werden.
Zum Antrieb des Bewegungsapparats wurde der Roboter mit Harmonic Drive® Einbausätzen der Baureihe CPL-2A ausgestattet. Die Baureihe überzeugt durch ihre kompakte Bauform und geringes Gewicht. Durch die große Hohlwelle ist die Durchführung von Versorgungsleitungen, Wellen und Kabeln für weitere Antriebssysteme möglich. Harmonic Drive® Einbausätze bestehen aus den drei Bauteilen Circular Spline, Flexspline und Wave Generator. Sie bieten maximale Freiheit bei der konstruktiven Einbindung sowohl auf der Antriebs- als auch auf der Abtriebsseite.
Sie möchten den Fortschritt des DFKI verfolgen?
Webseite: <link http: www.dfki.de robotik>www.dfki.de/robotik
Systemseite: <link http: www.dfki.de robotik de forschung robotersysteme mantis.html>www.dfki.de/robotik/de/forschung/robotersysteme/mantis.html
© Fotos: DFKI GmbH, Annemarie Popp