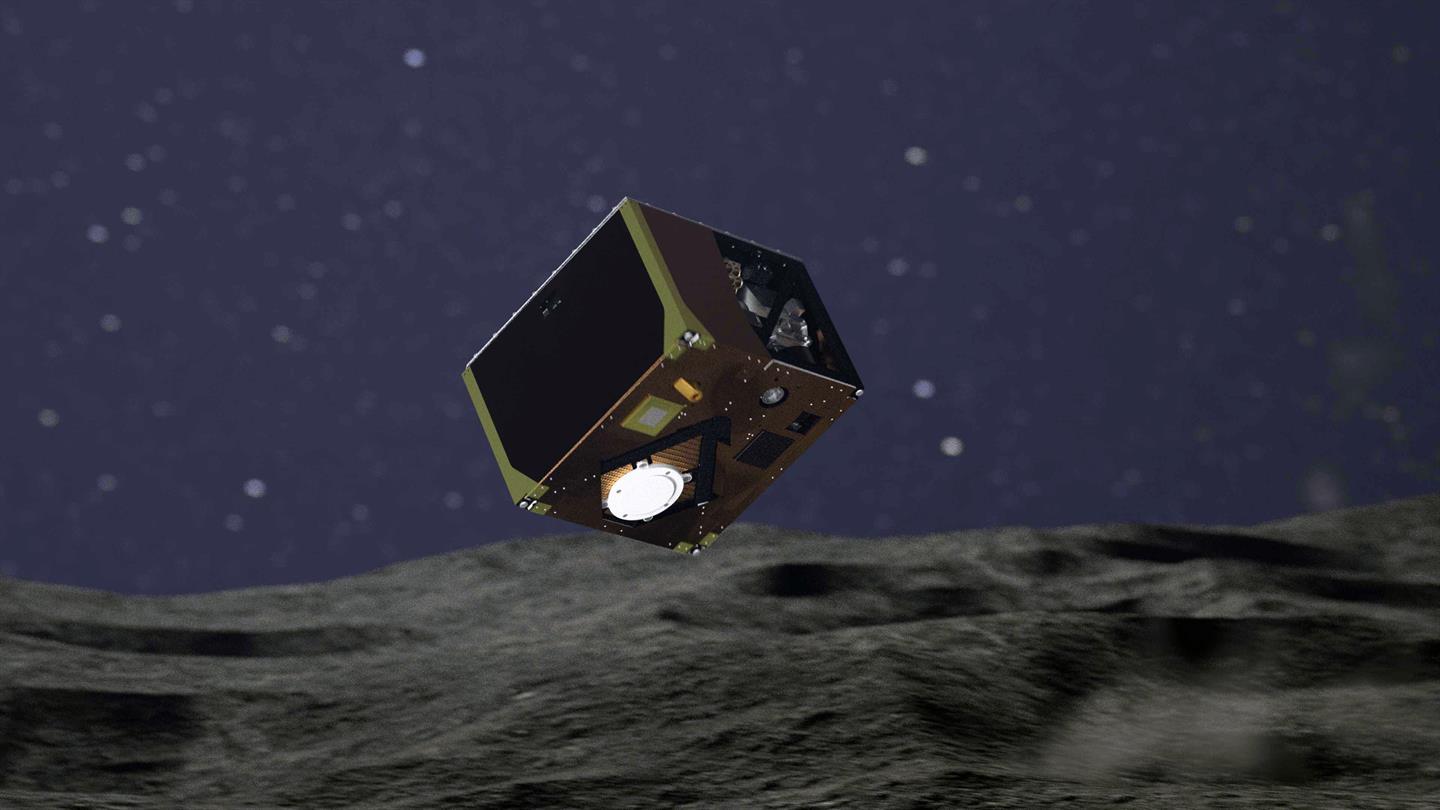
Am 3. Dezember 2014 begann die Reise der Raumsonde Hayabusa 2 und ihrer gleichnamigen Mission. Mit einer H-IIA-Trägerrakete der japanischen Raumfahrtbehörde JAXA gestartet, hob sie nach jahrelanger Planung und Entwicklung vom Tanegashima Space Center, dem japanischen Weltraumbahnhof, ab. Dabei verfolgte Hayabusa 2 ein klar definiertes Ziel: Sie sollte den erdnahen C-Typ-Asteroiden Ryugu (auch 1999 U3 genannt) erreichen und auf die Entnahme von Bodenproben hin zur Erde zurückkehren. Nach fast 3,5 Jahren gelang es der Sonde, sich dem Asteroiden am 27. Juni 2018 auf 20 km zu nähern und wenig später die vorherrschende Gravitation zu testen.
An Bord der Hayabusa 2 befand sich neben drei weiteren Rovern das Landegerät MASCOT (Mobile Asteroid Surface Scout). Als wissenschaftliches Hauptziel dieser etwa 10 kg schweren, quaderförmigen Einheit wurde die in-situ-Charakterisierung von Ryugu definiert, bei welcher dessen Oberflächeneigenschaften und -merkmale – von Regolith bis hin zu metergroßen Gesteinen – untersucht wurden.
Neben den bekannten Merkmalen des Weltalls wie dem Vakuumzustand, den thermischen Aspekten und der zusätzlich geringen Schwerkraft auf dem Asteroiden stellten insbesondere die Mobilitätseinschränkung sowie Platz- und Masseneinschränkung eine enorme Herausforderung an das MASCOT-Projekt. Da einige der Untersuchung zugewiesenen Instrumente (unter anderem Infrarot-Radiometer, Magnetometer, Kamera und Nahinfrarot-Hyperspektralmikroskop) für eine ordnungsgemäße Leistung eine nominale Orientierung benötigten, war ein innovativer Mobilitätsmechanismus zum Aufrichten und Verlagern auf der Oberfläche des Asteroiden notwendig.
Konventionelle Lösungsansätze mit Antriebsrädern wurden aufgrund der extremen Oberflächenunebenheiten, der geringen Schwerkraft sowie der Gewichtsbeschränkungen an das Projekt verworfen. Die zusätzliche Forderung nach hoher Zuverlässigkeit und hohem Drehmoment bei kompakter Bauweise konnte mithilfe eines bürstenlosen Gleichstrommotors in Kombination mit einem Harmonic Drive® Getriebe erfüllt werden. Dieser innovative Sprungmechanismus wurde im Cluster für Robotik und Mechatronik (RMC) des Deutschen Zentrums für Luft- und Raumfahrt (DLR) entwickelt. Er ermöglicht es dem Lander, sich bis zur Nominalposition aufzurichten und durch Springen (Hopping) auf der Asteroidenoberfläche zu bewegen.
Das Konzept der Mobilitätseinheit (MobUnit) berücksichtigt die unsicheren und rauen Umgebungsbedingungen auf der Asteroidenoberfläche, indem der Impuls einer exzentrischen Masse mit allen rotierenden Teilen vollständig innerhalb der MASCOT-Struktur genutzt wird. Durch das realisierte Hopping-Konzept in Verbindung mit einer vollständig redundant ausgeführten Elektronik wird eine sehr hohe Robustheit erreicht. Ein einziger Akteur reicht aus, um das System zu befähigen, sich zu verlagern und aufzurichten. Ermöglicht wird dies durch drei Bahnkurven mit unterschiedlichen Intensitätsstufen, sogenannte Trajektorien. Sobald sich der Lander auf der Asteroidenoberfläche wiederfindet, wird das Aufrichten und Springen automatisch initiiert.
Die Konstruktion der Mobilitätseinheit wird durch die kompakte Anordnung von Motor und Getriebe charakterisiert. Letzteres verfügt über eine Untersetzung von 1:30 und beruht auf den drei bewährten Elementen des Harmonic Drive® Wellgetriebes: dem Circular Spline, dem Flexspline und dem Wave Generator. Der Exzenterarm ist in einem zusätzlichen Lager gelagert und mit einer Schraube, die auch als MLI-Folienabstandshalter dient, an der Welle befestigt.
Ein weiteres Hindernis für die Mechanik der Mission stellte die lange Flugphase von etwa 3,5 Jahren dar. Innerhalb dieses Zeitraums plante man prinzipiell mit keiner Bewegung der mechatronischen Hardware. Besagte Umstände können zu einem hohen Risiko der Kaltverschweißung innerhalb der Lager und des Getriebes führen. Dementsprechend hat die Schmierung bei Weltraummissionen zwei Aufgaben. Die erste Aufgabe ist die Minimierung der Reibung, während die zweite die Vermeidung von Kaltverschweißungen fokussiert. Eine falsch gewählte Schmierung führt daher zu einer erheblichen Verminderung der Einsatzsicherheit. Aus diesem Grund wurde ein Getriebe mit einer Trockenschmierung aus Molybdändisulfid (MoS2) gewählt. Molybdändisulfid bietet einen weiten Temperaturbereich, besitzt einen niedrigen Reibungskoeffizienten und minimiert das Risiko von Kaltverschweißungen. Des Weiteren lässt sich bei der Verwendung von MoS2 auf Erfahrungswerte aus Weltraummissionen der letzten 50 Jahre zurückgreifen.
Am 3. Oktober 2018 wurde der MASCOT-Lander aus einer Höhe von 41 Metern erfolgreich von Hayabusa 2 auf den Asteroiden Ryugu abgeworfen. Nach einem freien Fall von etwa 6 Minuten nahm MASCOT erstmals Kontakt zur Asteroidenoberfläche auf. Bei einem Gesamteinsatz von 17 Stunden konnte er dank seiner Nutzlastsuite an drei unterschiedlichen Orten des Asteroiden wissenschaftliche Messungen durchführen. Die gemessene thermische Trägheit war deutlich geringer, als aufgrund von Labormessungen an Meteoriten erwartet wurde. Darüber hinaus zeigten die Ergebnisse des radiometrischen Instruments eine hohe Porosität sowie eine geringe Zugfestigkeit im Bereich von einigen hundert Kilopascal. In Anbetracht der gesammelten Erkenntnisse leistete die MASCOT-Mission einen wertvollen Beitrag zur Wissenschaft und wurde erfolgreich abgeschlossen.